Zbog nacina rada GoPro senzora snimka po jako suncanom danu vrlo lako uhvati jello. Na zalost tako je, mali senzor, kamera digne shutter speed i slika nekada zapliva.
Nakon milijun kombinacija svega i svacega, gumica koje su stigle uz Phantoma, balansiranja propelera, potpuno izbalansiranog gimbala jello se ipak u takvim uvjetima pojavi. Uvijek me kopalo i dinamicko balansiranje gdje sam na drugim DIY multijima postigao fantasticne rezultate. To mi je uostalom i zadnja mogucnost prije nego sto cijelu stvar rijesim sa ND filterom. Dakle slijedi par slika cisto da oni koje zanima vide o cemu se radi i isplati li se uopce.
Ideja je da se prvo dinamicki balansira motor, potom se izbalansiraju propeleri te se na kraju balansirani propeleri stave na balansirane motore i cijeli taj paket se finalno balansira.
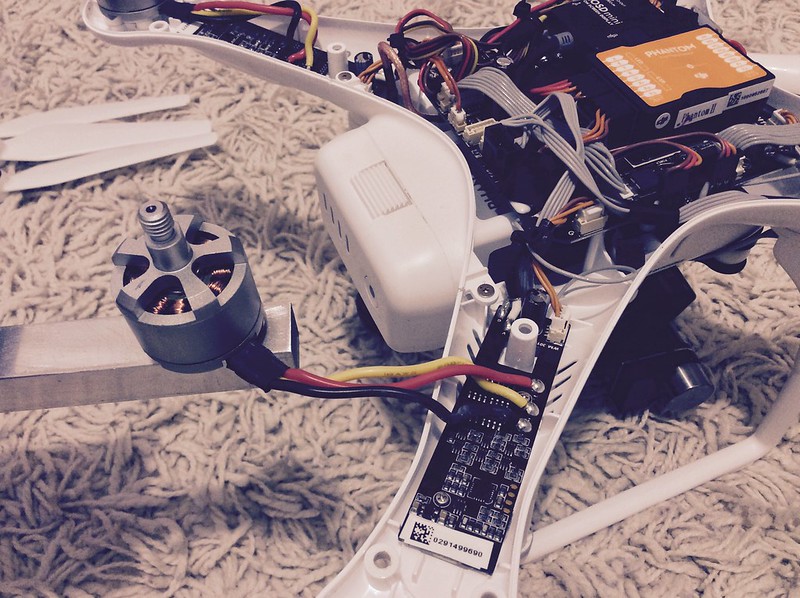
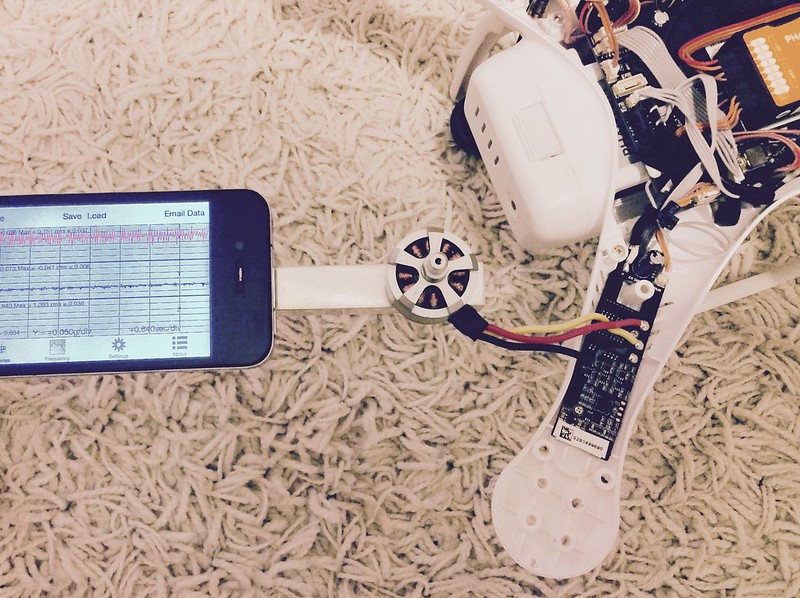
Potrebno je otvoriti Phantoma i odsarafiti jedan motor (ostale ostaviti). Taj motor treba staviti na zasebnu aluminijsku ruku (naravno sa pripremljenim svim rupama za motor kao da slazemo DIY kvad) kako bi smo mogli mjeriti vibracije. Motor je odvojen od Phantoma kako ostali motori ne bi utjecali na mjerenje i kako ne bi morali odlemljivati pojedine motore. Bitno je samo da se motor koji se mjeri ne nalazi na istom objektu kao i ostali. Na aluminijsku ruku staviti dva komada dvostrano ljepljive pjene koje koristimo za montiranje elektronike u modelima. Na tu pjenu stavljamo smartphone sa instaliranom KVALITETNOM aplikacijom za mjerenje vibracija.

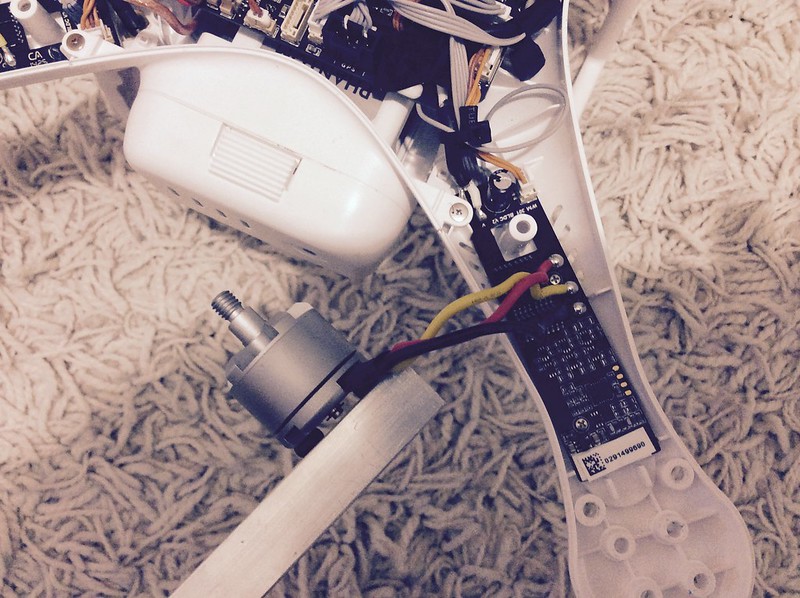
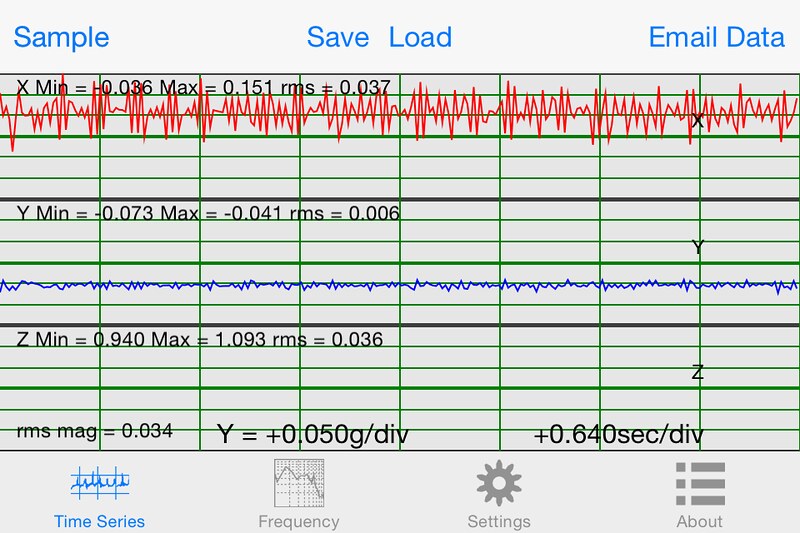
Kod samog mjerenja je nebitno kakve su apsolutne vrijednosti sto aplikacija mjeri, bitan je relativan odnos. Cilj je dodavanjem komadica izolirke na motor smanjiti vrijednost vibracija u odnosu na pocetnu.


Tako treba za svaki motor. Nakon toga stavljamo balansirane propelere (kojima su i hubovi balansirani) na motor i balansiramo ponovno cijeli komplet. Ispostavilo se da su motori (barem moji) fantasticno balansirani i da tu nema pomoci.
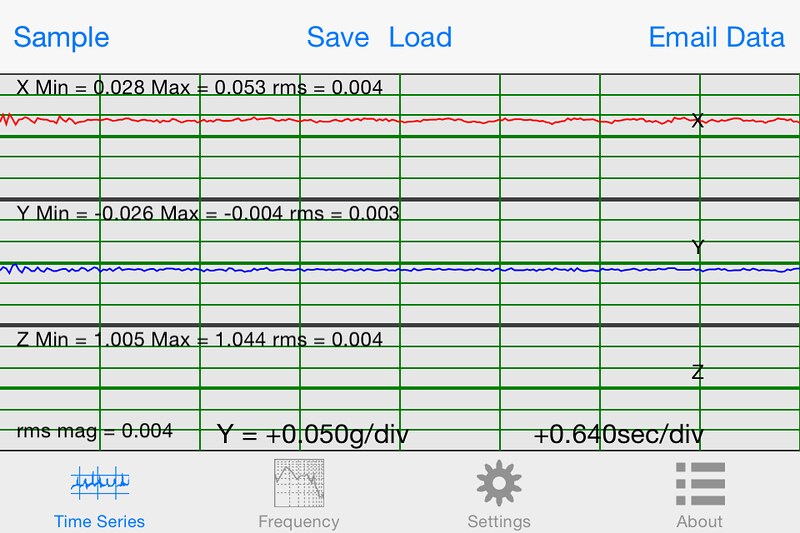
No vidi se napredak kada je na motoru kombinacija motora i propelera losa.
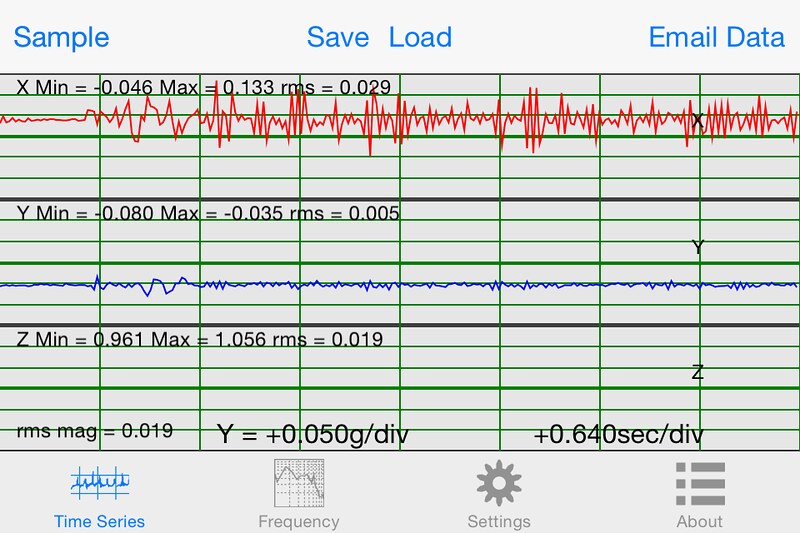
I kada su upareni.
 Topic: DJI Phantom 2 + Gopro = dobitna kombinacija (Read 148513 times)
previous topic - next topic
Topic: DJI Phantom 2 + Gopro = dobitna kombinacija (Read 148513 times)
previous topic - next topic